국외 자율주행기술 현황
자율주행 기술 개발은 기술 R&D보다는 상용화 및 제품 생산에 초점을 맞추고 있어 새발 속도가 가속화되고 있다. 글로벌 시장업체인 네비갠트 리서치(Navigant Research)는 자율주행기술 및 플랫폼을 개발하고 있는 세계 주요 19개 업체를 대상으로 경쟁력을 조사한 보고서를 발간하였다. 비전과 시장진입 전략, 파트너십, 생산 전략, 기술, 매출/마케팅/유통, 제품 품질 및 신뢰성 등에 의해 경쟁력을 비교하여 선두, 경쟁, 도전, 하위 그룹으로 구분한다. GM, 구글 Waymo, Daimler, Ford 등이 선두 그룹을 형성하였고, PSA, Toyota, Volvo, Baidu, Navya, 현대 등은 경쟁그룹으로, Apple, Uber, 테슬라, 혼다 등은 도전그룹으로 평가되었다.구글 Waymo
구글 자회사 웨이모 (Waymo)는 운전자없이 완전한 자율주행을 할 수 있는 시스템을 만들기위해 운전자의 지속적인 관찰이 필요한 차선 유지 등과 같은 문제를 해결하려고 노력중이다. 현재는 특정 조건에서만 운전자의 관찰이 필요한 미국자동차공학회(SAE) 기준 레벨 4의 자율주행 시스템을 완성하였다. 웨이모는 라이다와 카메라, 레이더 그리고 기타 부수적인 센서를 이용해 자동차 주변의 장애물과 사건을 인식하고 반응하는 시스템을 구축하였다.웨이모의 자율주행 소프트웨어는 크게 3가지로 관찰 단계, 행동 예측 단계, 계획 단계로 나눌 수 있다. 관찰 단계에서는 도로 주변의 물체들을 인식하고 무엇인지 구분하며 그 물체들의 속력, 방향, 가속도를 측정한다. 행동 예측 단계에서는 인식한 물체들이 도로 주변에서 어떻게 행동할지 예측한다. 웨이모는 수백만 마일을 주행한 경험을 바탕으로 예측할 수 있다. 계획 단계에서는 앞 두 단계에서 얻은 정보를 바탕으로 자동차가 어떤 길로 가야할지 계획한다. 이들은 경험상 방어적이고 소심한 운전이 가장 안전하다고 생각한다.
웨이모 시스템은 도로 종류, 거리, 차원 등 물리적 환경에 대한 깊은 이해로 실시간 정보를 통해 지도를 만들고 차의 위치를 파악할 수 있다. 뿐만 아니라 시범 주행을 통해 얻는 데이터를 수집하고 해석하는 시스템도 갖추고 있다. 인터넷 연결로 인한 해킹을 방어하는 시스템도 개발하였다.
테슬라 Tesla Autopilot
테슬라 오토파일럿(Autopilot)은 차선 유지, 자동차 컨트롤, 자율 주차, 운전자의 확인을 전제한 차선 변경 등을 제공하는 테슬라의 자율주행 시스템 및 하드웨어이다. 테슬라는 완전 자율 자동차를 제공하는 것을 목표로 하고 있다.향상된(Advanced) 오토파일럿은 교통 상황에 속도를 맞추고 차선을 유지하며, 운전자의 개입 없이도 스스로 차선을 변경한다. 또 하나의 간선도로에서 다른 간선도로로 옮겨가고 목적지에 근접하면 스스로 간선도로를 빠져나가며 자율 주차가 가능하다.
국외 공개 자율주행플랫폼 현황
Baidu Apollo
바이두는 2018년 7월 자율주행플랫폼 '아폴로 3.0'을 공개했다. '아폴로 3.0'은 미국 자동차공학회(SAE) 기준 레벨4 수준이다. 레벨4는 운전자의 개입이 필요 없는 수준이지만 만일의 상황을 대비해 운전자가 탑승해야 한다. '아폴로 3.0'에는 개발자와 파트너가 3개월 이내 자율주행차량을 개발할 수 있는 프로그램이 탑재되었다. 이 프로그램은 자율주행 주차, 무인 자율주행 배달, 무인 자율주행 셔틀 서비스로 3가지이다.주차대행의 경우 카메라, 초음파 레이더만 추가하면 모든 차량이 약 1509달러(약 168만원)의 비용으로 자율주행 주차 서비스를 이용할 수 있다. 또 자동조종 키트, 보안시스템, 운영 스케줄링 솔루션을 활용할 수 있다. 여기에 바이두의 음성인식 소프트웨어와 얼굴인식 기술, 피로감 징후 모니터링 기술, 맞춤 서비스 등 흥미로운 기술도 탑재됐다.
이 기술을 바탕으로 바이두는 올해 소프트뱅크 자회사 SB드라이브와 협력해 일본과 중국의 베이징, 심천, 우한 등 일부 도시에서 14인승 자율주행 미니버스 '아폴롱' 10대를 시범 운행할 방침이다. 아폴롱에는 바이두의 자율주행플랫폼 아폴로가 탑재됐다.
Autoware Foundation Autoware
오토웨어(Autoware)는 일본 나고야 대학과 나가사키 대학이 공동으로 개발하여 2015년 8월에 공개되었으며 현재에도 활발히 개발되고 있다. 오토웨어는 로봇 소프트웨어 플랫폼인 ROS(Robot Operation System)을 기반으로 개발된 응용 소프트웨어이다. 오토웨어는 라이다를 이용하여 만들어진 3차원 점지도가 미리 주어질 때, 주행 중에 라이다로부터 얻어진 3차원 점군 데이터를 이와 비교하여 차의 위치를 실시간으로 파악할 수 있다. 위치가 파악되면 목적지까지의 주행 경로를 계획하고 조향 휠, 가속 페달, 브레이크 페달, 기어 스틱 등을 제어해 자율 주행을 수행할 수 있다.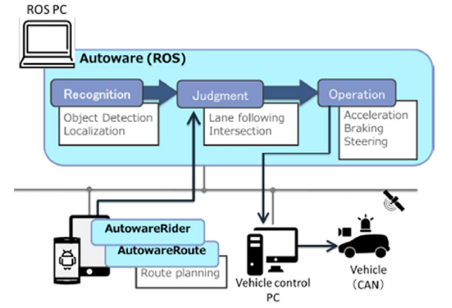
그림은 오토웨어의 동작과정을 개략적으로 보여준다. 첫째, 인식 단계에서는 라이다를 이용하여 3차원 점지도 상에서 자차 위치를 파악하고 카메라와 함께 장애물을 인식하다. 둘째, 판단 단계에서는 파악된 정보와 입력된 최종 목적지 정보를 기반으로 안전한 주행 경로를 계획하고 주행 차선, 교차로 진입 차선 등을 결정한다. 셋째, 주행 단계에서는 주어진 주행 경로에 따라 실시간으로 자동차의 목표 조향각과 목표 속도를 결정하고 차량 제어 컴퓨터에 전달한다. 마지막으로 차량 제어 컴퓨터는 전달받은 목표를 달성하기 위해서 휠, 가속 페달, 브레이크 페달 등을 조작한다.



No comments:
Post a Comment